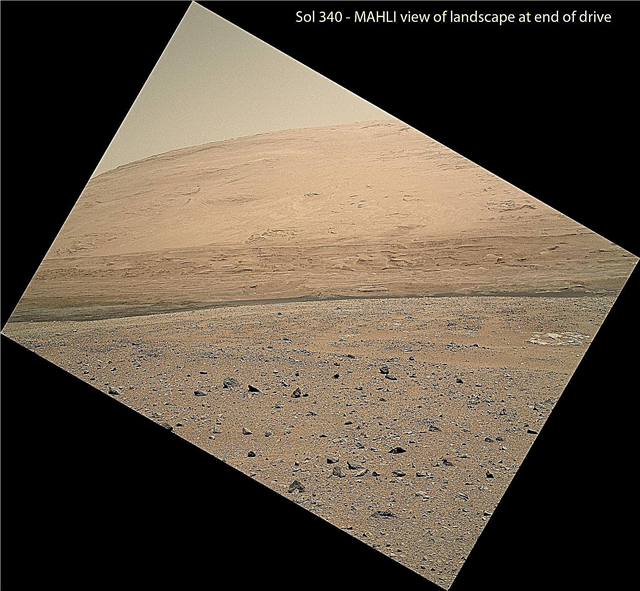
Cette scène a été prise sur Sol 340 peu de temps après que Curiosity ait terminé son plus long trajet
Le lecteur de 329,1 pieds (100,3 mètres) était deux fois plus long que le lecteur précédent de Solios par Curiosity. La caméra Mars Hand Lens Imager (MAHLI) du mobile Curiosity de la NASA est inclinée lorsque le bras du mobile est rangé pour la conduite. Pourtant, la caméra est capable d'enregistrer des vues du terrain que Curiosity traverse dans Gale Crater, et la rotation de l'image de 150 degrés fournit cette scène à droite. Crédit: NASA / JPL-Caltech / MSSS
Voir la carte de cheminement mise à jour ci-dessous [/ caption]
Le rover Curiosity de la taille d'une voiture de la NASA flamboie désormais sur la surface de la planète rouge et se déplace à un rythme record vers une imposante montagne martienne chargée de caches minérales qui pourraient potentiellement soutenir un environnement habitable.
Dimanche 21 juillet (ou Sol 340), Curiosity a parcouru la longueur d'un terrain de football - 109,7 mètres (100,3 mètres) - une portée deux fois plus longue qu'elle n'en avait jamais conduite depuis l'atterrissage spectaculaire sur Mars il y a près d'un an .
Le record précédent pour une journée de route était d'environ un demi-terrain de football - 54 mètres (49 mètres) - et atteint sur Sol 50 (26 septembre 2012), environ sept semaines après l'atterrissage pulsatoire à l'intérieur de Gale Crater en août. 6, 2012.
Le robot à 6 roues a pu se déplacer jusqu'à présent parce que lors de la conduite précédente, elle s'est retrouvée au sommet d'une élévation offrant une vue exceptionnellement bonne du paysage environnant et de la route qui traverse le fond du cratère vers le mont Sharp - l'objectif de conduite ultime.

"Ce qui nous a permis de conduire jusqu'à présent sur le Sol 340 commençait à un point culminant et avait également des images Mastcam nous donnant la taille des roches afin que nous puissions être sûrs qu'elles n'étaient pas dangereuses", a déclaré le planificateur de rover Paolo Bellutta du Jet Propulsion Laboratory de la NASA, Pasadena, Californie, dans une déclaration de la NASA.
«Nous pouvions voir assez loin, mais il y avait une zone en face qui n'était pas clairement visible, nous avons donc dû trouver un chemin autour de cette zone.»
Après une autre longue route de 68,2 yards (62,4 mètres) le mercredi 23 juillet (Sol 342), la distance totale de conduite de la mission à ce jour s'élève à 0,81 mile (1,23 kilomètre).
Le mont Sharp se trouve à environ 8 kilomètres à vol d'oiseau.
Le 4 juillet, Curiosity a entrepris le voyage épique vers le mont Sharp après avoir terminé plus de sept mois d'investigations scientifiques et de forage interplanétaire historique et d'analyse d'échantillons dans une région connue sous le nom de Glenelg et Yellowknife Bay. Là, elle a découvert un environnement habitable avec les ingrédients chimiques qui pourraient soutenir les microbes martiens, atteignant ainsi déjà l'objectif principal de la mission phare de la NASA sur Mars.
Une combinaison d'expérience accrue des ingénieurs dirigeant le méga rover ainsi que des mises à niveau logicielles intermédiaires jouent également un rôle clé dans l'accélération de Curiosity vers le mont Sharp de 5,5 km.
Un énorme bond en avant sur Mars est en cours d’élaboration en utilisant un nouveau logiciel de conduite appelé navigation autonome, ou autonav, qui accélérera le voyage par voie terrestre.
«Nous avons mis un nouveau logiciel - appelé autonav, ou navigation autonome - sur le véhicule juste après la période de conjonction en mars 2013», a déclaré Jim Erickson, Curiosity Project Manager, dans une interview exclusive avec Space Magazine. Erickson est du Jet Propulsion Laboratory (JPL) de la NASA à Pasadena, en Californie.
«Cela augmentera notre capacité à conduire.»

La mise en œuvre du nouveau logiciel de conduite rendra Curiosity plus intelligent et plus performant, productif et indépendant que jamais.
"Avec autonav, le rover aura la capacité de comprendre jusqu'où il roule, qu'il glisse ou non, et cela améliore la sécurité", m'a dit Erickson.
La route du rover est sur une direction sud-ouest vers les anciennes couches sédimentaires au pied de la montagne au milieu du cratère Gale.
En plus d'établir de nouveaux records de conduite, le rover de 1 tonne conduit également plus fréquemment et plusieurs jours de plus.
Lorsque tout se synchronise, Curiosity peut conduire deux jours ou plus d'affilée.
«Nous pouvons conduire deux jours de suite maintenant si le moment est opportun. Si nous obtenons les résultats du trajet du jour (n) à temps avant de planifier le trajet du lendemain (n + 1) - presque comme si vous étiez à l'heure de Mars. Ensuite, cela fonctionnerait bien », a expliqué Erickson.
«De plus, lorsque nous aurons la capacité d'autonav, nous pouvons planifier deux jours de suite. Un jour de conduite dirigée et le deuxième jour peuvent être "OK, voici votre cible où que vous vous trouviez, essayez d'aller à cet endroit". "
"Cela augmentera la productivité!"
Erickson dit que l'équipe teste actuellement Autonav et devrait être opérationnel dans quelques semaines, ou plus tôt.
Lisez les parties 1 et 2 de mon entretien avec Jim Erickson pour plus de détails.

Pendant ce temps, la sœur aînée de Curiosity, Opportunity, accélère vers son propre objectif de montagne et devrait arriver à la base de Solander Point assez tôt en août.
Solander Point est un segment du bord érodé d'un énorme cratère Endeavour et peut également posséder des ingrédients clés essentiels pour soutenir un environnement favorable à d'éventuels microbes martiens.
Et il vaut la peine de noter que la sœur cadette Opportunity détient le record du monde de conduite à distance en 1 jour de 219,89 mètres - établi il y a plus de 8 ans sur le Sol 410 (20 mars 2005) !!
Restez à l'écoute pour en savoir plus sur la paire de robots martiens de la NASA.